(2)サイボーグプロジェクト(齋藤直人)
はじめに
私は整形外科医で,産婦人科とは医局が隣であるという以外に,ほとんど関係がない.本稿を日本産婦人科医会から依頼していただいた時に,同期の産婦人科医に「仕組んだだろ」と問い詰めたら「知らない」というので,ちょっと嬉しくなってお引き受けした次第である.産婦人科の若い先生方に,こんな研究もあるということを知っていただければ嬉しい.また,研修ノートNo. 100 の記念号に載せていただけるのは,大変光栄なことである.
リハビリテーションロボット
現在,リハビリテーションロボットの開発は花盛りである.昨年の日本リハビリテーション医学会の機器展示会場は多くのロボットが並び,またロボットをつけた人が会場内を歩き回っていて,さながら空想の未来都市に迷い込んだ感があった.世界中で開発競争が激戦となり,日本でも2014 年に「日本再興戦略」でロボット開発が最重要戦略の1 つにあげられて,国産ロボットも多数開発されている.すでに臨床応用されており,2016 年5 月にはロボットを用いたリハビリテーションが保険収載された.次に来る波は,病院でのリハビリテーション医療限定から,日常生活での使用だと思われる.ある程度障害が固定した患者さんの日常生活動作を改善するために,ロボットを装着して人体機能の一部または全部を補う使用方法である.歩けない障害をもった人が歩けるようになったら,それは素晴らしいことである.現在リハビリテーションに使われているロボットも,多くが日常生活使用をめざしている.ロボットが厚生用義肢や装具のように,社会福祉制度で購入し日常生活で使用できる日は,びっくりするほどすぐにやってくると思う.
ウェアラブルロボットの問題点
しかし,このような日常生活を支援するウェアラブルロボットには,いくつかの問題がある.第一に,ロボットの着脱である.もともと障害のある人が1 人で装着することは,極めて難しい.介助者がいなければ身に着けることはできず,おそらく多くの場合脱ぐこともできないだろう.日常生活で常に介護者がいる状況は少なく,宝の持ち腐れになってしまう可能性がある.第二は,ロボットの持ち運びである.旅行などに行くときは移動に時間がかかるので装着しないことが多く,ロボットをもっていかなければならない.これでは荷物が何倍にもなってしまうのである.旅に出た時ほどロボットで動き回りたいのに,残念ながらもっていくことができない.第三は,ロボットを装着したまま風呂やプールに入ることが困難であり,排尿・排便すら邪魔になってしまうことである.これらの課題は現在検討され,着々と改善されつつある.しかし,この解決法を突き詰めていけば,最後に到達するのはどこであろう.我々が出した答えは「ロボットそのものを体内に埋め込む」であり,それは「サイボーグ」ということになる.
サイボーグプロジェクト
おそらく我々と同じようにロボットを埋め込むということを発想した研究者はいるだろう.しかしこれまで,そのアイデアはほとんど発表されてこなかった.それは,現時点ではどう考えてもロボットを体内に埋め込むことが不可能だからである.しかし,10 年後はどうだろう.ロボットは飛躍的に小型化,軽量化している.電池も小さくなり,駆動時間も長くなっている.生体材料も進歩している.それでもまだ埋め込めないかも知れない.では,20 年後はどうだろう.私は,間違いなくロボットを体の中に埋め込むことができるようになっていると思う.それなら,今から準備しなければならない.そこで我々は「サイボーグプロジェクト」という名前を付けて,ロボットを体の中に埋め込む研究に,真剣に取り組むことにした.あくまでも科学的に,論理的に,課題を1 つひとつ解決していく.目標は5 年でプロトタイプを完成させることである.現在,2 年経過したところだが,数えきれないほど会議を行ってきた.会議は毎回楽しく,議論の種はつきない.何しろ課題はいくらでもあるのだから.新しいアイデアが出ると弁理士さんに入ってもらい,特許を出願してきた.すでに部分的には設計図ができており,予想以上に目標に向かって進んでいると感じている.
歩行アシストロボットcurara
基盤となるロボットは,信州大学繊維学部の橋本稔教授が開発を進めている歩行アシストロボットcurara(クララ)である(図47).名前は「アルプスの少女ハイジ」の登場人物にちなんでいる.このcurara の特徴は,着用した人の動きをセンサーでとらえ,その動きに追従してアクチュエーターで歩行をアシストする,独自の「同調制御法」を採用していることである.また,従来のパワーアシストロボットのような「外骨格型」構造ではなく,着用する人の骨格系を利用して動きを補助するという新しい発想に基づく「非外骨格型」であることも特徴だ.これらの特徴は,生体内に埋め込む基盤となるロボットとして適していると思う.直観として,外骨格型ロボットは硬すぎる感じがする.非外骨格型ロボットは柔軟なので,柔軟な生体にうまく適合するだろう.実際に橋本稔教授は2016 年の夏に,curara をパンツに取り付けた「穿くロボットcurara」を開発し,発表した(図48).

ロボットを体内に埋め込む技術
この歩行アシストロボットcurara を体内に埋め込むために,骨折治療で一般的に使われる髄内釘を利用することを思いついた(図49).これは医学部で,しかも整形外科からしか出てこないアイデアだと思う.この方法を用いないとロボットを生体内に設置することは強度的に不可能であり,間違いなく主流となるアイデアだと自画自賛している.さらに生体に埋め込んで非接触充電が可能な超小型電池を,工学部が開発している.典型的な医工連携研究だが,実は基盤となるロボットは繊維学部が造っているので,日本初の医工繊維連携研究である.なぜ日本初かというと,信州大学にしか繊維学部がないからだ.さらに企業が複数参画しているため当然産学連携研究であり,文部科学省の国立大学改革強化推進補助金で実施しているため産学官連携研究になる.
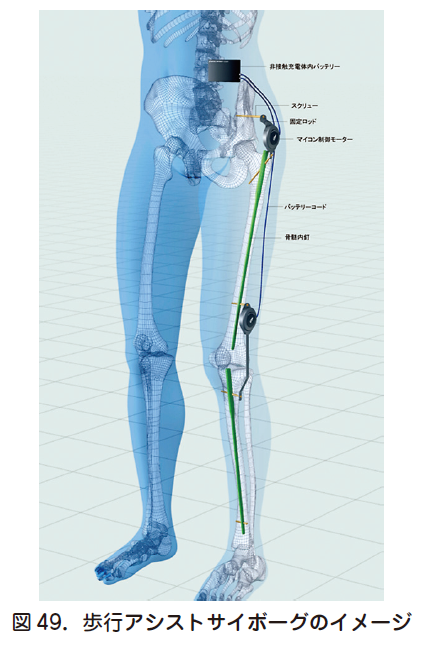
歩行アシストサイボーグの課題
これからいよいよプロトタイプの試作に向かうわけだが,まだまだ難題が山積みである.そもそもイメージとして示した図49 のような構造では,股関節も膝関節も決して動かない.体外装着型ロボットの場合は,皮膚や服による遊びがあるために関節が動くが,体内埋め込み型で骨と固定されると,遊びが全くないため決して動かないのである.整形外科医がいうのだから間違いない.この課題は皆で頭を絞って図面上は解決したが,実際に形にしようとするとさらにいくつもの問題が出てくる.また,生体との接触面をどうするかも問題で,生体適合性の高い材料に変えていく必要がある.さらに電池も難題だ.生体内に埋め込む安全で大容量の電池は,全く新しい開発になる.しかし,ここで気が付くことがある.これらの様々な課題を1 つひとつ克服すれば,それらはロボットと異なる分野の発展につながるということである.すでにペースメーカーや薬剤注入ポンプでは,小容量の体内埋め込み電池が臨床応用されている.容量の大きい体内埋め込み電池が開発されたら,これらの機器の有効性はさらに高まるであろう.それどころか,これまで電源の問題で対内に埋め込めなかった医療機器が,埋め込めるようになるかもしれない.また,生体適合性材料の開発は,新しい埋め込み型医療機器の開発に直結する.近い将来,ロボットだけでなく多くの医療機器が体内に埋め込まれることが予想されるが,その基盤技術を提供することができるのである.それにより,大きな医療革命が引き起こされる可能性があると考えている.
サイボーグプロジェクトの近未来
この「サイボーグプロジェクト」は,これからどこにいくのであろう.未来の医療を変える夢の研究であることは確信している.しかし,この夢が実現する時,はたして私は生きているのだろうか.しかし,研究は夢をみているときが一番楽しい.実現(臨床応用)が近づくと,どんどん苦しくなってくる.本当に楽しんで取り組めるこのサイボーグプロジェクトは,私にとって他の研究とは一線を画す宝物である.産婦人科とはあまり関係がないかもしれない.しかし楽しい研究に,専門科の違いなど小さなことだ.もともと超異分野融合の超境界領域研究である.興味のある方はぜひご一報いただきたい.一緒に大きな夢をみてくださる,研究が大好きな仲間を募集している.